














 При создании бионических протезов, управляемых нервными сигналами, полезно научиться формировать и обратный (тактильный) канал связи механической руки с мозгом пациента. Возможности такой системы показал опыт с обезьянами.
При создании бионических протезов, управляемых нервными сигналами, полезно научиться формировать и обратный (тактильный) канал связи механической руки с мозгом пациента. Возможности такой системы показал опыт с обезьянами.
Эксперимент провели Мигель Николелис (Miguel Nicolelis) и его коллеги из университета Дюка, уже десяток лет ставящие опыты по соединению различных участков мозга животных с внешними приборами.
На этот раз в роли внешней аппаратуры выступал компьютер с виртуальной рукой, которой обезьяна должна была дотрагиваться до тех или иных целей на виртуальном столе.
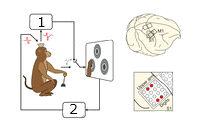 Схема эксперимента. Обезьяна видит перед собой на экране стол с предметами и виртуальную руку. Последней можно управлять либо джойстиком, либо сигналами с коры (1). Самое интересное тут – обратная связь от «ощупываемых» предметов к коре (2) (иллюстрация Joseph E. O’Doherty, Miguel A. L. Nicolelis/ Nature).
Схема эксперимента. Обезьяна видит перед собой на экране стол с предметами и виртуальную руку. Последней можно управлять либо джойстиком, либо сигналами с коры (1). Самое интересное тут – обратная связь от «ощупываемых» предметов к коре (2) (иллюстрация Joseph E. O’Doherty, Miguel A. L. Nicolelis/ Nature).
Обезьян научили подносить руку своего аватара к предметам с определённой текстурой, за что они получали пищу. Затем управление виртуальной рукой перевели с джойстика на сигналы, снимаемые другим имплантатом с моторной коры головного мозга.
Успешность выполнения задачи сразу упала, но затем обезьяны показали, что со временем учатся использовать такой интерфейс и наращивать точность движений, сообщает Technology Review.
На фоне опытов с управлением силой мысли манипуляторами роботов командование рукой на экране может показаться незначительным достижением. Но зато здесь впервые была применена обратная связь с мозгом. «Мы декодировали двигательные намерения и тактильные сообщения одновременно, — говорит Николелис. — Этого никогда не делали раньше». Следующий логичный шаг – интегрирование чувства осязания в протезы (тут можно вспомнить опыты с "кожей" роботов), которыми можно было бы управлять при помощи мыслей (или как вариант — при помощи миотоков) пациента.
(Детали эксперимента раскрывают пресс-релиз университета и статья в Nature.)
Источник: Membrana


